ಹಾವಿನಂತೆ ಏರುವ ರೋಬೋಟ್ ಅಭಿವೃದ್ಧಿಪಡಿಸಿದ ವಿಜ್ಞಾನಿಗಳು
ಹಾವುಗಳ ಚಲನೆಯ ಪ್ರೇರಣೆಯಿಂದ, ಎಂಜಿನಿಯರ್ಗಳು ದೊಡ್ಡ ಮೆಟ್ಟಿಲುಗಳನ್ನು ಸ್ಥಿರವಾಗಿ ಏರುವಂತಹ ರೋಬೋಟ್ ಅನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಿದ್ದಾರೆ, ಇದು ಉತ್ತಮ ಹುಡುಕಾಟ ಮತ್ತು ಪಾರುಗಾಣಿಕಾ ರೋಬೋಟಗಳ ಆವಿಷ್ಕಾರಕ್ಕೆ ಕಾರಣವಾಗಬಹುದು.

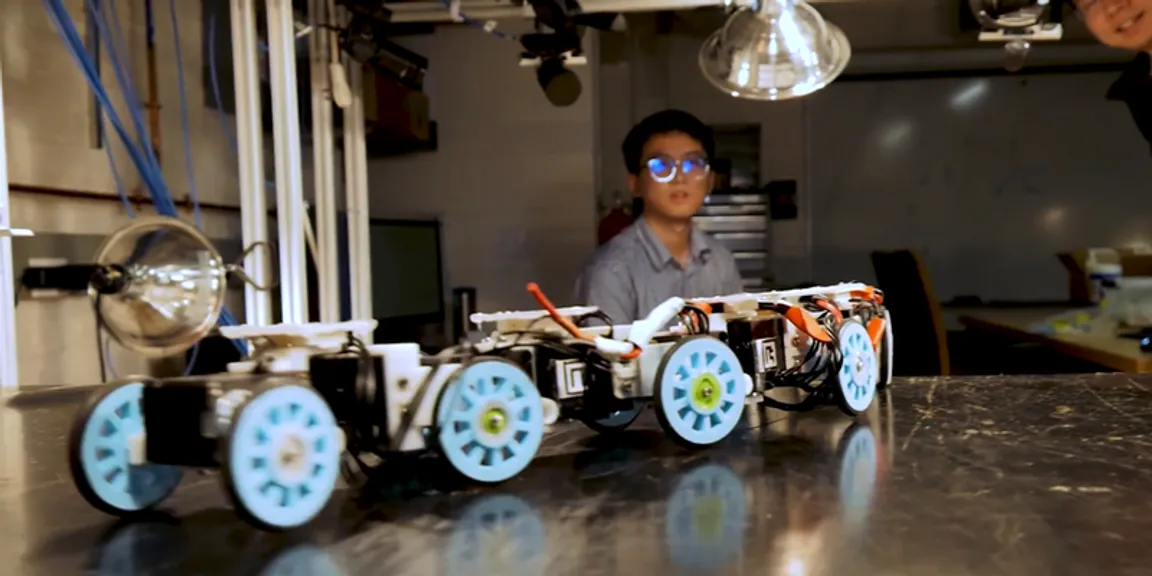

ಚಿತ್ರಕೃಪೆ: ಜೆ ಎಚ್ ಯು
ರಾಯಲ್ ಸೊಸೈಟಿ ಓಪನ್ ಸೈನ್ಸ್ ಜರ್ನಲ್ನಲ್ಲಿ ವಿವರಿಸಲಾದ ರೋಬೋಟ್ ತನ್ನ ದೇಹದ ಉದ್ದದ ಶೇಕಡಾ 38 ರಷ್ಟು ಎತ್ತರವಿರುವ ಮೆಟ್ಟಿಲುಗಳನ್ನು ಯಶಸ್ವಿಯಾಗಿ ಏರಿತು.
"ನಾವು ಈ ತೆವಳುವ ಜೀವಿಗಳ ಚಲನೆಯನ್ನು ಸ್ಫೂರ್ತಿಗಾಗಿ ನೋಡುತ್ತೇವೆ ಏಕೆಂದರೆ ಅವು ಈಗಾಗಲೇ ತಮ್ಮ ದಿನನಿತ್ಯದ ಜೀವನದಲ್ಲಿ ಅಡೆತಡೆಗಳನ್ನು ನಿವಾರಿಸುವಲ್ಲಿ ಸಮರ್ಥವಾಗಿವೆ. ನಮ್ಮ ರೋಬೋಟ್ ಹಾವುಗಳಂತೆ ಮೇಲ್ಮೈಗಳಾದ್ಯಂತ ಹರಿದಾಡಿ ಹೇಗೆ ಚಲಿಸಬಹುದು ಎಂಬುದನ್ನು ಕಲಿಯಬಹುದು," ಎಂದು ಜಾನ್ಸ್ ಹಾಪ್ಕಿನ್ಸ್ ವಿಶ್ವವಿದ್ಯಾಲಯದ ಲೇಖಕ ಚೆನ್ ಲಿ ಹೇಳಿದರು.
ಹಿಂದಿನ ಅಧ್ಯಯನಗಳು ಸಮತಟ್ಟಾದ ಮೇಲ್ಮೈಗಳಲ್ಲಿ ಹಾವಿನ ಚಲನೆಯನ್ನು ಗಮನಿಸಿವೆ, ಆದರೆ ಮರಗಳನ್ನು ಹೊರತುಪಡಿಸಿ 3ಡಿ ಭೂಪ್ರದೇಶದಲ್ಲಿ ಅವುಗಳ ಚಲನವನ್ನು ಅಷ್ಟಾಗಿ ಅಧ್ಯಯನಮಾಡಲಾಗಿಲ್ಲ ಎಂದಿದ್ದಾರೆ.
ಅವರ ಪ್ರಕಾರ, ಇಲ್ಲಿಯವರೆಗೆ ಹಾವಿನ ಚಲನೆಯನ್ನು ಅನುಕರಿಸಲು ಪ್ರಯತ್ನಿಸುತ್ತಿರುವ ಎಂಜಿನಿಯರ್ಗಳು ನಿಜ ಜೀವನದಲ್ಲಿ ಶೋಧ ಮತ್ತು ಪಾರುಗಾಣಿಕಾ ರೋಬೋಟ್ಗಳು ಎದುರಿಸಬೇಕಾಗಿ ಬರುವ ದೊಡ್ಡ ಅಡೆತಡೆಗಳಾದ ಕಲ್ಲುಮಣ್ಣು ಮತ್ತು ಭಗ್ನಾವಶೇಷಗಳನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಂಡಿಲ್ಲ.
ಸಾಮಾನ್ಯವಾಗಿ ಮರುಭೂಮಿಗಳು ಮತ್ತು ಪೈನ್-ಓಕ್ ಕಾಡುಗಳಲ್ಲಿ ಕಂಡುಬರುವ ಕಿಂಗ್ ಸ್ನೇಕ್ ಹೇಗೆ ಪ್ರಯೋಗಾಲಯದಲ್ಲಿ ಮೆಟ್ಟಿಲುಗಳನ್ನು ಏರಿತು ಎಂಬುದನ್ನು ಲಿ ಮತ್ತು ಅವರ ತಂಡವು ಅಧ್ಯಯನ ಮಾಡಿದೆ.

"ಈ ಹಾವುಗಳು ನಿಯಮಿತವಾಗಿ ಬಂಡೆಗಳು ಮತ್ತು ಬಿದ್ದ ಮರಗಳಾದ್ಯಂತ ಪ್ರಯಾಣಿಸಬೇಕಾಗುತ್ತದೆ; ಅವು ಚಲನೆಯಲ್ಲಿ ತುಂಬಾ ನಿಪುಣವಾಗಿವೆ ಮತ್ತು ಅವುಗಳಿಂದ ನಾವು ಕಲಿಯಬಹುದಾದದ್ದು ಬಹಳಷ್ಟಿದೆ," ಎಂದು ಲಿ ಹೇಳಿದರು.
ಈ ಅಡೆತಡೆಗಳಿಗೆ ಪ್ರತಿಕ್ರಿಯೆಯಾಗಿ ಹಾವುಗಳು ತಮ್ಮ ದೇಹವನ್ನು ಹೇಗೆ ರೂಪಿಸಿಗೊಳ್ಳುತ್ತವೆ ಎಂಬುದನ್ನು ಗಮನಿಸಲು ವಿಜ್ಞಾನಿಗಳು ಸರಣಿ ಪ್ರಯೋಗಗಳನ್ನು ನಡೆಸಿದರು, ಹಂತ ಹಂತವಾಗಿ ಎತ್ತರ ಮತ್ತು ಮೇಲ್ಮೈ ಘರ್ಷಣೆಯನ್ನು ಬದಲಾಯಿಸಿ ಅವು ಹೇಗೆ ಚಲಿಸುತ್ತದೆ ಎಂಬುದನ್ನು ನೋಡಿದರು. ಹಾವುಗಳು ತಮ್ಮ ದೇಹವನ್ನು ಮೂರು ಭಾಗಗಳಾಗಿ ವಿಭಜಿಸುತ್ತವೆ ಎಂದು ಅವರು ಕಂಡುಕೊಂಡರು.
ಹಾವುಗಳ ಮುಂಭಾಗ ಮತ್ತು ಹಿಂಭಾಗದ ದೇಹವು ಅಲೆಯಂತೆ ಸಮತಲವಾದ ಮೆಟ್ಟಿಲುಗಳ ಮೇಲೆ ಹಿಂದಕ್ಕೆ ಮತ್ತು ಮುಂದಕ್ಕೆ ಹೋರಳಾಡುತ್ತವೆ ಮತ್ತು ಅವುಗಳ ಮಧ್ಯದ ದೇಹದ ಭಾಗವು ಗಟ್ಟಿಯಾಗಿ ಉಳಿದುಕೊಂಡು, ದೊಡ್ಡಮೆಟ್ಟಿಲನ್ನು ಹತ್ತಲು ಸುಳಿದಾಡುತ್ತದೆ ಎಂದು ಸಂಶೋಧಕರು ವಿವರಿಸಿದರು.
ಸುತ್ತಿಕೊಂಡಿರುವ ಭಾಗಗಳು, ಹಾವನ್ನು ಕೆಳಗೆ ಬೀಳದಂತೆ ತಡೆಯಲು ಸ್ಥಿರತೆಯನ್ನು ಒದಗಿಸುತ್ತವೆ ಎಂದು ಅವರು ಹೇಳಿದರು.
ಹಾವುಗಳು ಮೇಲಿನ ಮೆಟ್ಟಿಲುಗಳಿಗೆ ಹತ್ತಿರವಾಗುತ್ತಿದ್ದಂತೆ ಹೆಜ್ಜೆಯ ಮೇಲಿನ, ಮೂರು ದೇಹದ ವಿಭಾಗಗಳು ಪ್ರತಿ ದೇಹದ ವಿಭಾಗದ ಕೆಳಕ್ಕೆ ಹೋಗುವದನ್ನು ಸಂಶೋಧಕರು ಕಂಡುಕೊಂಡರು.
ಮೆಟ್ಟಿಲಿಗೆ ಹಾವು ಸನಿಹವಾಗುತ್ತಿದ್ದಂತೆ, ಅದರ ಮುಂಭಾಗದ ದೇಹದ ಭಾಗವು ಉದ್ದವಾಯಿತು ಮತ್ತು ಅದರ ಹಿಂಭಾಗದ ಭಾಗವು ಚಿಕ್ಕಾಗುತ್ತ ಹೋಯಿತು ಮತ್ತು ಮಧ್ಯದ ದೇಹದಲ್ಲಿ ಯಾವುದೇ ಬದಲಾವಣೆಯಾಗಲಿಲ್ಲ, ಎರಡು ಹಂತಗಳಲ್ಲಿ ನೇರವಾಗಿ ನಿಂತಿತ್ತು ಎಂದು ಅಧ್ಯಯನವು ತಿಳಿಸಿದೆ.
ಮೆಟ್ಟಿಲುಗಳು ಎತ್ತರವಾದಾಗ ಮತ್ತು ಇಳಿಜಾರಾದಾಗ, ಹಾವುಗಳು ಹೆಚ್ಚು ನಿಧಾನವಾಗಿ ಚಲಿಸುತ್ತವೆ ಮತ್ತು ಸ್ಥಿರತೆಯನ್ನು ಕಾಪಾಡಿಕೊಳ್ಳಲು ತಮ್ಮ ಮುಂಭಾಗ ಮತ್ತು ಹಿಂಭಾಗದ ದೇಹವನ್ನು ಕಡಿಮೆ ಹೋರಳಾಡಿಸುತ್ತವೆ ಎಂದು ವಿಜ್ಞಾನಿಗಳು ಹೇಳಿದರು.
ವೀಡಿಯೊಗಳನ್ನು ವಿಶ್ಲೇಷಿಸಿ ಮತ್ತು ಹಾವುಗಳು ಪ್ರಯೋಗಾಲಯದಲ್ಲಿ ಹೇಗೆ ಮೆಟ್ಟಿಲುಗಳನ್ನು ಹತ್ತಿದವು ಎಂಬುದನ್ನು ಗಮನಿಸಿ, ಸಂಶೋಧಕರು ಸರೀಸೃಪಗಳ ಚಲನೆಯನ್ನು ಅನುಕರಿಸುವ ರೋಬೋಟ್ ಅನ್ನು ರಚಿಸಿದರು.
ರೋಬೋಟ್ ಹಾವು ಮೊದಲಿಗೆ ದೊಡ್ಡ ಹೆಜ್ಜೆಗಳಲ್ಲಿ ಸ್ಥಿರವಾಗಿರಲು ತೊಂದರೆ ಅನುಭವಿಸಿತು ಮತ್ತು ಆಗಾಗ್ಗೆ ಒದ್ದಾಡಿ ಮತ್ತು ಪಲ್ಟಿ ಹೊಡೆಯಿತು ಅಥವಾ ಮೆಟ್ಟಿಲುಗಳ ಮೇಲೆ ಸಿಲುಕಿಕೊಂಡಿತು ಎಂದು ಅವರು ಹೇಳಿದರು.
ವಿಜ್ಞಾನಿಗಳು ನಂತರ ಪ್ರತಿ ದೇಹದ ಭಾಗಕ್ಕೆ ಅವಶ್ಯಕತೆ ಬಂದಾಗ ಚಿಕ್ಕದಾಗುವ ವ್ಯವಸ್ಥೆಯನ್ನು ಸೇರಿಸಿದರು ಆದ್ದರಿಂದ ಅದು ಅಗತ್ಯವಿದ್ದಾಗ ಮೇಲ್ಮೈಗೆ ವಿರುದ್ಧವಾಗಿ ಸಂಕುಚಿತಗೊಳ್ಳುವ ಮೂಲಕ ಎತ್ತರವನ್ನು ಕ್ರಮಿಸಿತು.
ಹೊಂದಾಣಿಕೆಗಳನ್ನು ಮಾಡಿದ ನಂತರ, ಹಾವಿನ ರೋಬೋಟ್ ಕಡಿಮೆ ಚಂಚಲವಾಗಿ, ಹೆಚ್ಚು ಸ್ಥಿರವಾಯ್ತು ಮತ್ತು ದೇಹದ ಉದ್ದದ ಶೇಕಡಾ 38 ರಷ್ಟು ಎತ್ತರಕ್ಕೆ ಏರಿತು ಮತ್ತು ಸುಮಾರು 100 ಪ್ರತಿಶತದಷ್ಟು ಯಶಸ್ಸಿನ ಪ್ರಮಾಣವನ್ನು ಹೊಂದಿದೆ ಎಂದು ಅವರು ಹೇಳಿದರು.
ಆದಾಗ್ಯೂ, ಸಂಕುಚಿತಗೊಳ್ಳುವ ವ್ಯವಸ್ಥೆಯನ್ನು ಸೇರಿಸಿದಾಗ ರೋಬೋಟ್ ಹೆಚ್ಚು ವಿದ್ಯುತ್ ಬಳಸಿತು.
"ಪ್ರಾಣಿಗಳು ಇನ್ನೂ ಮೇಲ್ದರ್ಜೆಯಲ್ಲಿವೆ, ಆದರೆ ಈ ಫಲಿತಾಂಶಗಳು ದೊಡ್ಡ ಅಡೆತಡೆಗಳನ್ನು ದಾಟಬಲ್ಲ ರೋಬೋಟ್ಗಳ ಕ್ಷೇತ್ರಕ್ಕೆ ಆಶಾದಾಯಕವಾಗಿವೆ," ಎಂದು ಲಿ ಹೇಳಿದರು. ಅಲ್ಲದೆ ಮಾನವರು ಸರಿಯಾಗಿ ಕ್ರಮಿಸಲಾಗದೆ ಉಳಿದಿರುವ ಭೂಪ್ರದೇಶದಲ್ಲಿ ಯಶಸ್ವಿಯಾಗಿ ಸಂಚಾರ ಮಾಡಬಹುದು.